

AAEON’un PICO-TWL4’ü Araştırmacıların Okyanus Keşfine
Derin Dalışını Güçlendiriyor
Genel Bakış
Deniz tabanı haritalama, jeobilim, deniz biyolojisi ve iklim
değişikliği araştırmaları gibi disiplinlerde faydalı olan akademik
araştırmaların hayati bir alanıdır. Son yıllarda deniz ekosisteminde meydana
gelen değişimlere yönelik küresel farkındalık artmış, bu tür keşiflerin
çevresel girişimleri şekillendirme üzerindeki etkisi de derinleşmiştir.
Bir grup araştırmacı, akademik araştırma amaçlı olarak
otonom bir su altı aracı (AUV) çalıştırabilecek gömülü bir bilgisayar platformu
arayışıyla AAEON ile iletişime geçti. Proje parametreleri dikkatle
incelendikten sonra, müşteri AAEON’un PICO-TWL4 ürününün denizlerin
sırlarını çözmede anahtar olduğunu belirledi.

Proje Gereksinimleri: Derin Bir Dalış
Görev Süresinin Maksimize Edilmesi
Müşterinin önceliği, AUV’nin geniş alanları kapsayabilmesi
ve uzun süre çalışabilmesiydi. AUV insansız olduğundan, sıcak değiştirilebilir
batarya birimi kullanımı mümkün değildi ve bu nedenle odak noktası güç
verimliliğinin maksimize edilmesi oldu.
Stabil ve Hassas Navigasyon
Daha önce keşfedilmemiş yerlerin incelenmesi birçok zorluk
barındırır ve navigasyon bunların en önemlisidir. Fabrika gibi çevresinin büyük
ölçüde öngörülebilir olduğu ortamlarda çalışan otonom araçların aksine, AUV’ler
karmaşık bir 3D ortamda hareket etmek zorundadır.
Numune Toplama İçin Motor Kontrolü
AUV’nin görevi, farklı bölgelerden deniz tabanı numuneleri
toplamaktı. Bu nedenle seçilen platform, yalnızca nesne tespiti ve engellerden
kaçınmayı desteklemekle kalmayıp aynı zamanda yük kontrol komutlarını da
gönderebilmeliydi.
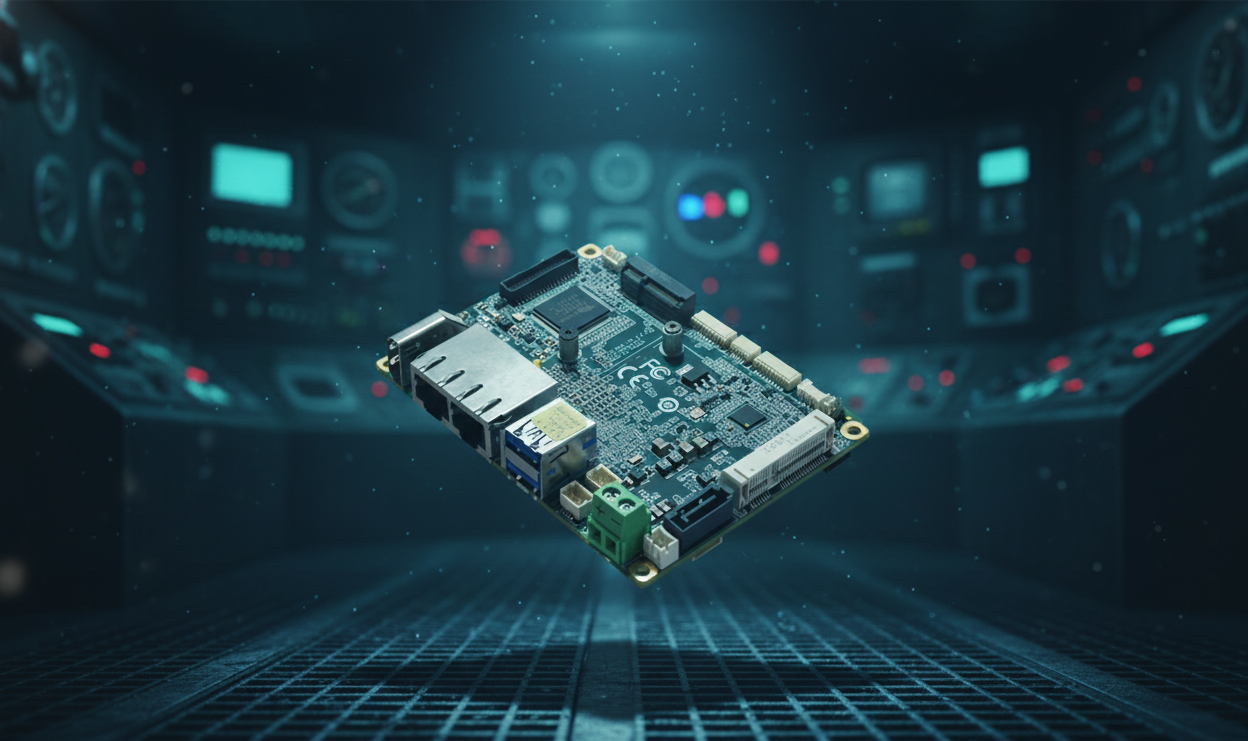
Gemi Yönetimi: PICO-TWL4
İşlevsellik ile çevresel stabilite arasındaki hassas denge
göz önünde bulundurulduğunda, AAEON’un PICO-TWL4 ürünü, müşteriye
projelerinde en uygun platform olarak öne çıktı.
Dört Çekirdekli İşlem ve Düşük Güç Modları
PICO-TWL4, verimliliğe odaklı Intel® Processor N-serisi
(eski adıyla Twin Lake) işlemcilerden biri olan Intel® Core™ 3 Processor N355
veya N150 ile çalışabilen modellerde sunulmaktadır. Müşteri, AUV’nin güvenilir
çalışmasını sağlarken düşük güç tüketimini de koruyan Intel® Processor N150
modelini tercih etti.
Intel® Processor N150 yalnızca 6W temel güçle çalışmasına
rağmen, dört çekirdeği ve görece yüksek saat hızı sayesinde sensör füzyonu,
yük kontrolü ve navigasyon verisi işleme gibi paralel görevleri rahatlıkla
yerine getirebilmekteydi.
PICO-TWL4’ün BIOS’u varsayılan olarak CPU C-states’i
etkinleştirir ve S3 modunu destekler, böylece AUV aktif işlem
yapmadığında güç tüketimi ciddi şekilde azalır ve ihtiyaç duyulduğunda
operasyon sorunsuz şekilde devam eder.
Çevre Dostu Özelleştirme
Düşük güç tüketimli PICO-TWL4 platformu, AUV’nin kat
edebileceği mesafeyi artırırken sürekli çalışabileceği süreyi de uzattı. AAEON
ayrıca kartı, standart lityum bataryayı süperkapasitörle değiştirerek
özelleştirdi.
Süperkapasitörler neredeyse sonsuz şarj-deşarj döngüsüne
sahip olduğundan, AUV’nin kullanım senaryosu için idealdi ve böylece AUV’nin
durma süresi büyük ölçüde azaldı. Süperkapasitörlerin şarj süresi yaklaşık
300 saniye iken, lityum bataryalar saatlerce sürebilir; bu durum, uzak
bölgelerdeki araştırma seferleri için büyük bir engel teşkil ederdi.

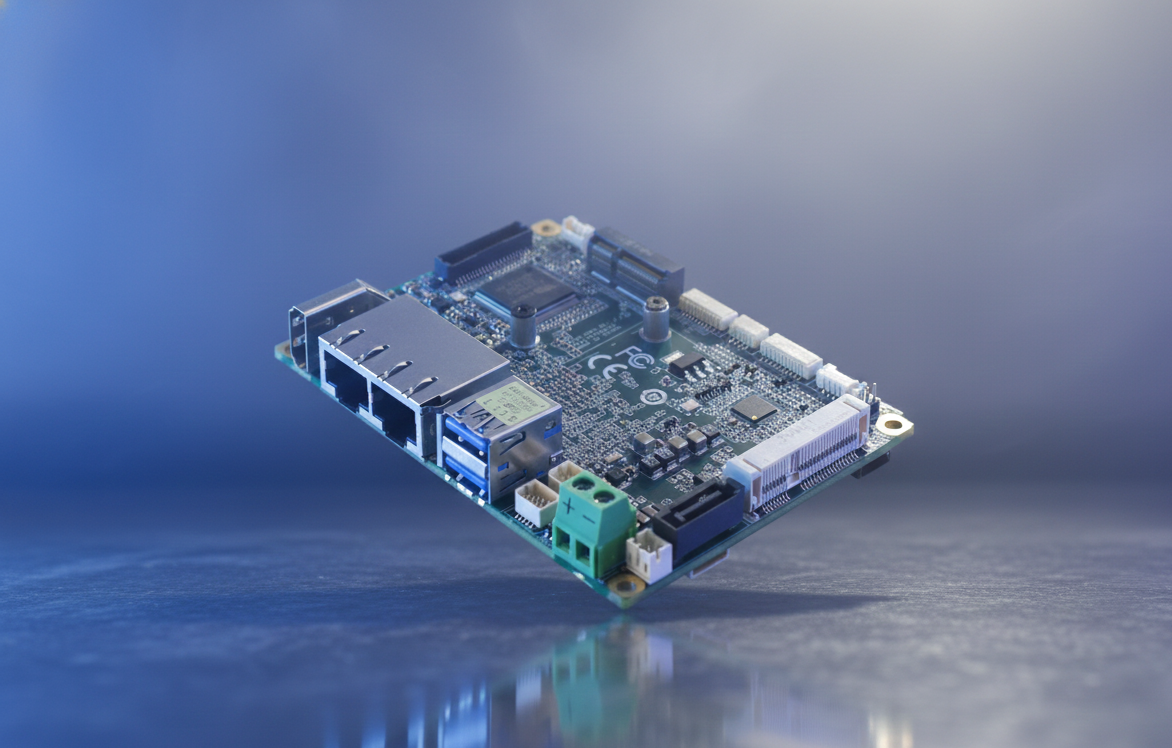
Çoklu Sensör Desteği
PICO-TWL4 sadece 100mm x 72mm boyutunda olmasına
rağmen, AUV’nin navigasyon ve pozisyon verilerini toplamak için gereken
sensörleri destekleyen çeşitli arayüzler sunuyordu.
En önemli özelliklerden biri, dört COM port konektörü
sağlayan 40-pin header idi; bunlardan ikisi RS-232/422/485, diğer ikisi
RS-232 protokolünü destekliyordu.
- İki
COM port, AHRS (Attitude and Heading Reference System) ve altimetre
ile entegre edilerek AUV’nin deniz tabanına göre konumu ve yüksekliği
ölçüldü. AHRS sayesinde AUV 3D yönelim, mutlak ve göreli baş yön
verilerini gerçek zamanlı olarak sağlarken, altimetre engellerden ve deniz
tabanından çarpışmayı önledi.
- Header’daki
üçüncü COM port, bir sonar kurulumu için kullanıldı ve AUV’nin güvenli
hareketini sağlayarak rota planlamasında yerel haritalama sağladı.
Ek sensörler, PICO-TWL4’ün iki USB 3.2 Gen 2 portu ve dört
dahili USB 2.0 konektörü aracılığıyla entegre edildi. Bunlar arasında sıcaklık,
su basıncı ve mesafe ölçüm sensörleri gibi görev odaklı ek çevre birimleri
yer aldı.
Gerçek Zamanlı Yük Kontrolü
Deniz tabanından numune toplamak için AUV’nin merkezi
bilgisayarı, hareket kontrol cihazlarıyla iletişim kurabilmeliydi. Bu noktada PICO-TWL4’ün
çift LAN portu devreye girdi.
- 1GbE
ve 2.5GbE hızında çalışan iki RJ-45 port sayesinde, AUV’nin su numune
alıcıları ve vakum pompaları için komutlar iletildi.
- Bu
komutlar yüksek hassasiyet gerektiriyordu. PICO-TWL4’ün RJ-45 portu, Intel®
Ethernet Controller I226 sürücüsü ve Time-Sensitive Networking
(TSN) özellikleri sayesinde, navigasyon sensörlerine göre hassas
zamanlama ile komutları yürüttü.
Sonuç olarak, AUV, AHRS, altimetre ve sonar tarafından
takip edilen diğer değişkenleri dikkate alarak koordineli çoklu yük
operasyonu gerçekleştirebildi.
Etkisi
AAEON’un PICO-TWL4’ü ana kontrol birimi olarak kullanarak
AUV’lerini başarıyla devreye alan müşteri, yalnızca akademik araştırma
projelerini etkin şekilde yürütmekle kalmadı, aynı zamanda yan faydalar
da elde etti:
- Düşük
güç tüketimi ve dinamik güç yönetimi sayesinde operasyon süresi uzadı.
- Süperkapasitörün
hızlı şarj olması sayesinde toplam sistem durma süresi dakikalarla sınırlı
kaldı. Bu özelleştirilmiş bileşen, AUV’nin genel dayanıklılığına katkı
sağladı.
- Lityum
bataryalar aşırı sıcaklıkta aşırı ısınma veya patlamaya yatkın olduğundan,
süperkapasitör kullanımı hem daha güvenli hem de daha termal olarak stabil
bir çözüm sundu.
PICO-TWL4’ün çeşitli arayüzleri sayesinde, sistem yalnızca
modern değil aynı zamanda eski iletişim protokollerini de destekleyerek geleceğe
dönük bir çözüm sağladı.
Sonuç olarak, PICO-TWL4, müşterinin projesinin başarıyla hayata geçmesini sağlamakla kalmadı; akademik deniz tabanı keşiflerinde yeni derinlikler sunarak, deniz araştırmalarında otonom araçların potansiyelini gösterdi.